mactonight
New Member
Hi everyone,
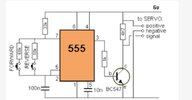
I'm working on a servo motor control circuit using a 555 timer. I have the following circuit (attach the schematic if possible). When I remove the button connected to the 68k resistor, the servo moves to 180° but does not return to 0°.
What I want to achieve:
Any suggestions would be greatly appreciated.
Thanks in advance!
I'm working on a servo motor control circuit using a 555 timer. I have the following circuit (attach the schematic if possible). When I remove the button connected to the 68k resistor, the servo moves to 180° but does not return to 0°.
What I want to achieve:
- When I press the button once, the servo should move to 180°.
- It should stay in that position for 1-2 seconds.
- Then, it should automatically return to 0° without pressing the button again.
- I cannot use an Arduino, so I need a fully analog solution.
Any suggestions would be greatly appreciated.
Thanks in advance!
")
