GammaRay86
New Member
Hello,
I'm using a PIC with EECP PWM to control the direction and speed of a DC motor. I have the L293DNE to use as an H-Bridge.
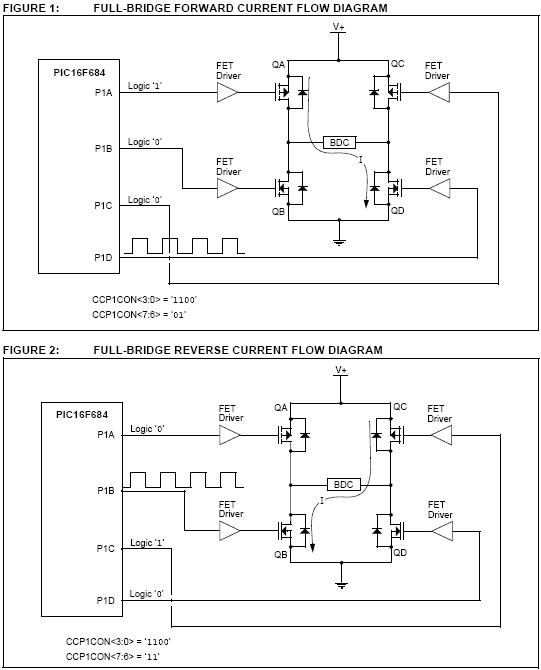
I'm using the full bridge of the PIC PWM as shown below:
Below is the L293DNE chip controlling a bi-directional motor:
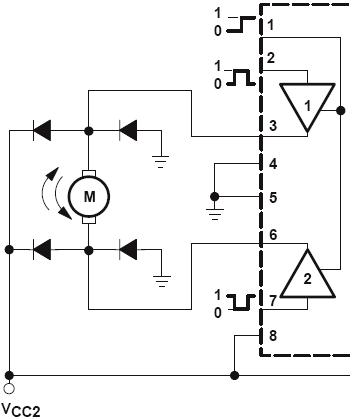
My main question is can I simply connect P1A and P1C to pins 2 and 7 of the L293DNE and connect both P1B and P1D to pin 1 of the L293DNE?
For the forward direction P1D will modulate and for the reverse direction P1B will modulate.
Also, because the outputs are coming from a PIC, do I require those driver FETS show in the first images or are they in the L293DNE already. I would imagine so because the bottom image does not show them.
Is what I am thinking correct? I'd really appreciate any input. Thanks alot!
I'm using a PIC with EECP PWM to control the direction and speed of a DC motor. I have the L293DNE to use as an H-Bridge.
I'm using the full bridge of the PIC PWM as shown below:
Below is the L293DNE chip controlling a bi-directional motor:
My main question is can I simply connect P1A and P1C to pins 2 and 7 of the L293DNE and connect both P1B and P1D to pin 1 of the L293DNE?
For the forward direction P1D will modulate and for the reverse direction P1B will modulate.
Also, because the outputs are coming from a PIC, do I require those driver FETS show in the first images or are they in the L293DNE already. I would imagine so because the bottom image does not show them.
Is what I am thinking correct? I'd really appreciate any input. Thanks alot!

