Hello to everyone.
I want to make a pmsm motor drive with FOC. I am currently doing the necessary research. I will later test this motor driver on a motor with sensor structure. but I want your help on some issues that come to my mind.
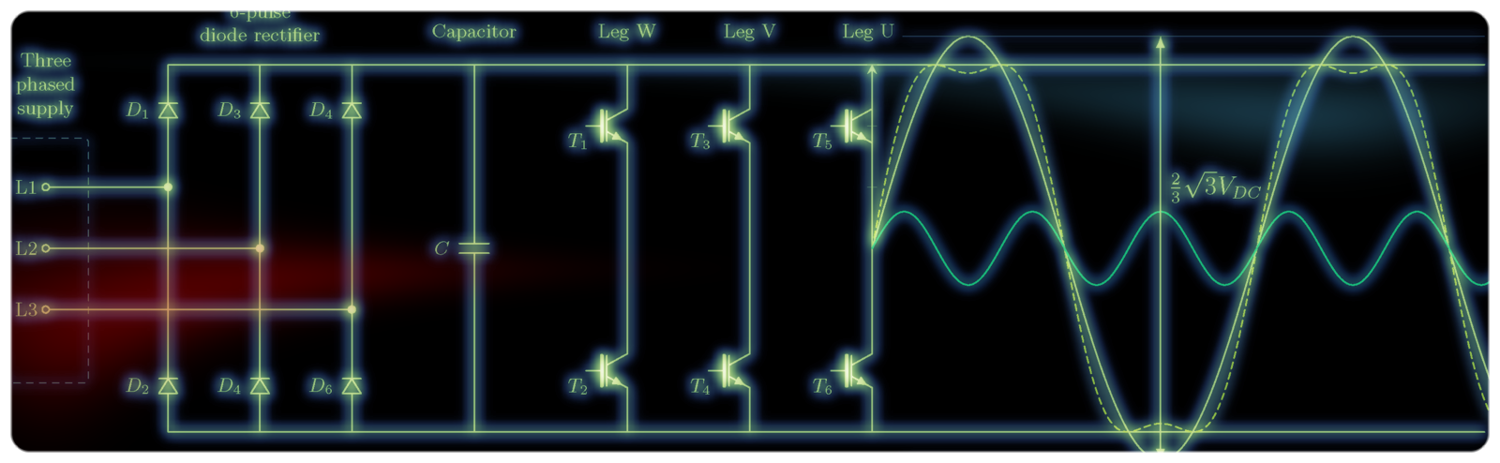
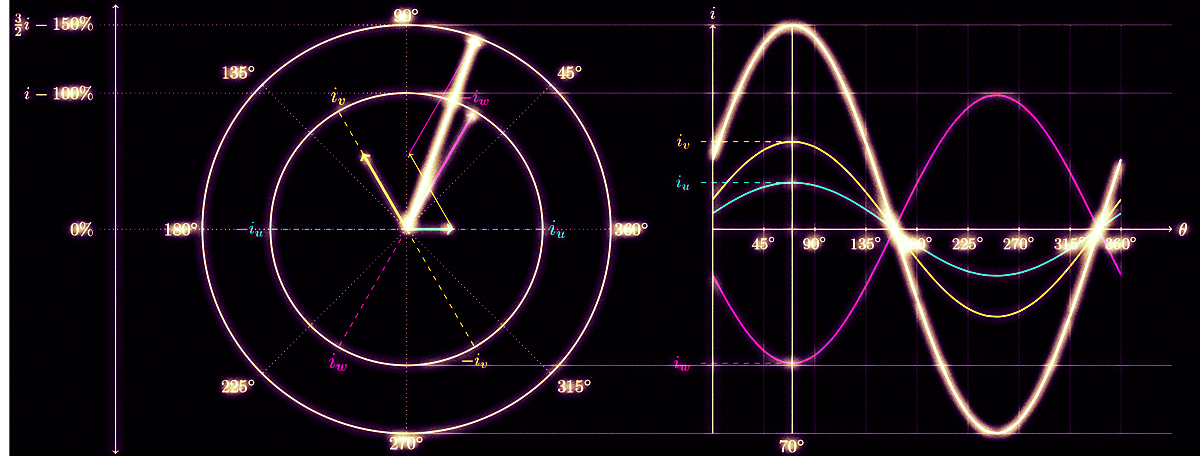
First of all, I need your information about a method that I am very curious about and cannot understand in research. How is the SVPWM method applied? How to apply SVPWM especially after inverse clark transformations. How is the signal applied to the inverter legs?
Although I studied many sources on this subject, I could not learn. Please help me.
In particular, in the pdf I added below, there are various information about this topic on pages 12 and 13. but I could not understand the connection of the example on page 13 with the values of Vr1, Vr2 and Vr3 obtained in the inverse clark transformation.
Especially what is described in figure 6-3 on page 13?
I want to make a pmsm motor drive with FOC. I am currently doing the necessary research. I will later test this motor driver on a motor with sensor structure. but I want your help on some issues that come to my mind.
First of all, I need your information about a method that I am very curious about and cannot understand in research. How is the SVPWM method applied? How to apply SVPWM especially after inverse clark transformations. How is the signal applied to the inverter legs?
Although I studied many sources on this subject, I could not learn. Please help me.
In particular, in the pdf I added below, there are various information about this topic on pages 12 and 13. but I could not understand the connection of the example on page 13 with the values of Vr1, Vr2 and Vr3 obtained in the inverse clark transformation.
Especially what is described in figure 6-3 on page 13?

 . I understood the information you mentioned. The example in the 2nd .gif is very good. but here are two inverter representations below of that .gif , but I don't understand what they are. and I am very confused. Can you tell by giving an example? thank you.
. I understood the information you mentioned. The example in the 2nd .gif is very good. but here are two inverter representations below of that .gif , but I don't understand what they are. and I am very confused. Can you tell by giving an example? thank you.
